Jason’s Website
Welcome to my website. I am a 2nd year masters of engineering in controls and robotics student completing my graduate degree at the University of Toronto. My interests are multiagent and limited order control systems. I am the founder and software team lead of UTRA Robosoccer. Canada’s first humanoid robot team comprised of purely undergraduate students. In 2018, our team participated in the 2018 Robocup. We have a lot of talented people on our team. You can find out about our team and our awesome robot and team members at http://utrahumanoid.ca/. Although we were just undergraduate students and didn’t win the Robocup. We still managed to make a name as Canada’s first undergraduate team participating in the Robocup.
Undergraduate Capstone
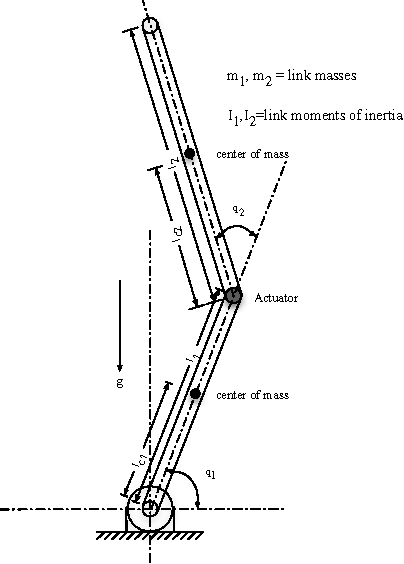
I have done a undergraduate capstone project on underactuated systems (https://en.wikipedia.org/wiki/Underactuation). An underactuated system is a system with fewer control torques than degrees of motion. An example of an underactuated system is the double pendulum. Where only one motor is controlling two degrees of freedom. We are currently still working on this project. Progress on the robot can be found here (Github)
Undergraduate Thesis
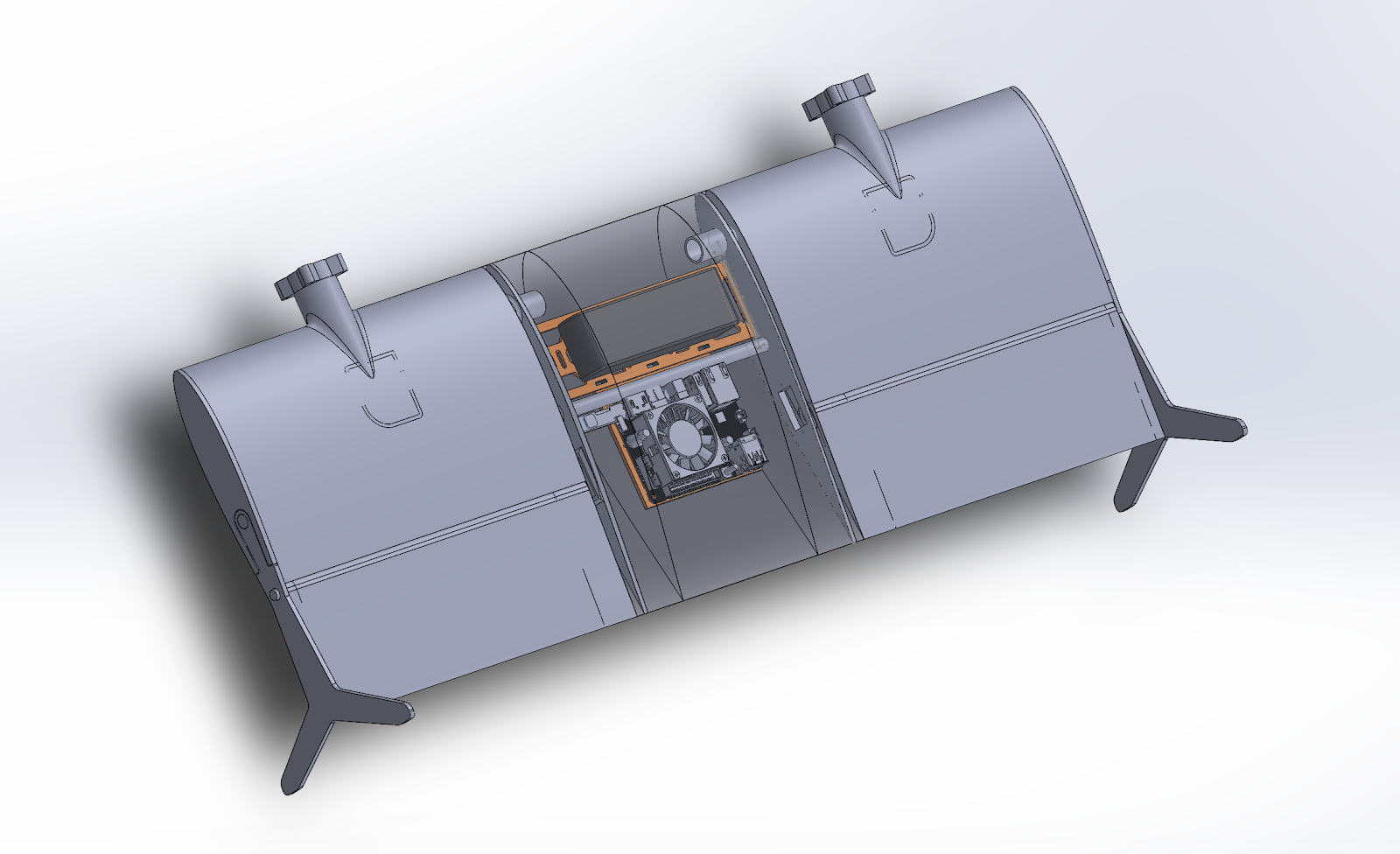
I had worked with my principal investigator Jonathan Kelly on a quadcopter project. However this is not an ordinary quadcopter. This quadcopter has only two propellors and 2 airelons, and its designed to be able to fly with only two propellors. The simulation and the computer vision of this project is designed with the goal of two tailsitter robots into each other while in flying motion.
Professional Work on Robotics
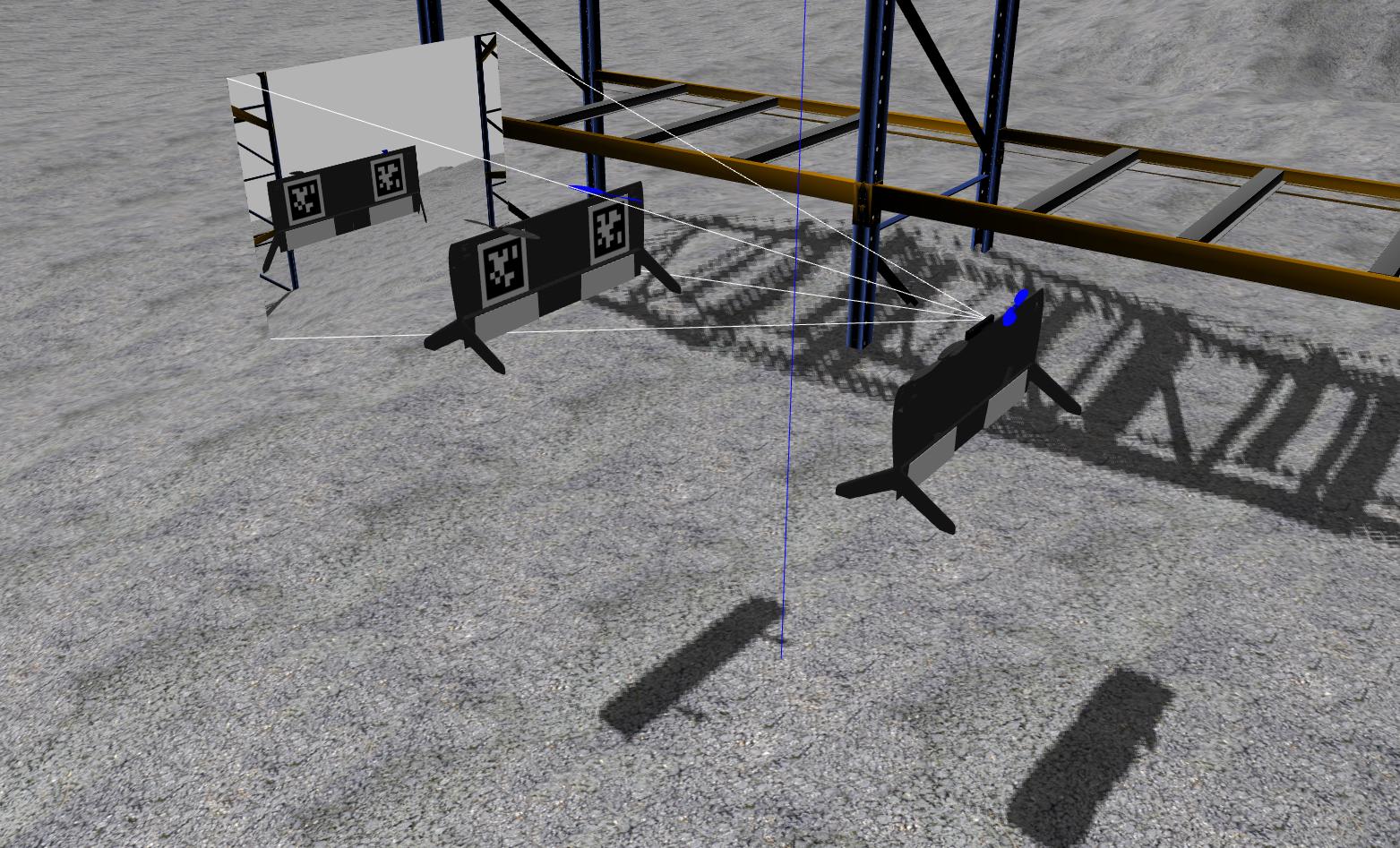
During my PEY I worked on a multi-agent robot system at Rapyuta Robotics(https://www.rapyuta-robotics.com/), a cloud robotics platform for improving warehouse efficiency by creating item delivery robots to reduce the time that warehouse workers needed to take. The system improved the efficiency of workers by 40% and reduced the amount of steps humans needed to take. I created a end-to-end docker and ROS multi-robot simulation that works on the cloud for up to 30 robots. Each of the robots in the picture are not just simulated. The entire system including the dispatcher and the inventory management system as well as all the communication bridges between the robots was all put into a development environment.

Image of the simulation I used at work (Cannot provide too much information about this as I signed an NDA)